آیا تا به حال به این فکر کردهاید که چگونه یک وسیله نقلیه روباتیک که معمولاً در کاربردهای نظامی با مهار بمب استفاده میشود، کنترل میشود یا چگونه دستگاههای برش وفرم دهی فلز، حرکت دقیقی را برای فرز، تراش و خم کاری جهت ساخت فلز فراهم میکنند و یا اینکه چگونه یک سیستم موقعیتیابی آنتن، دقت را در آزیموت و ارتفاع کنترل میکند؟
همانطور که در این مقاله خواهید آموخت، کاربردهای سروو موتور بیشتر در سیستمهای حلقه بسته مورد استفاده قرار میگیرند، که در آن کنترل موقعیت دقیق معمولاً در کاربردهای صنعتی و تجاری یافت میشود.
در این مقاله به این خواهیم پرداخت که سروو موتور چیست و چگونه کار می کند، بنابراین اجازه دهید ابتدا مشخص کنیم که سرو موتور چیست و برخی از ویژگی های منحصر به فرد انواع سروو موتور و کاربرد سروو موتور زیمنس را بررسی می کنیم.

سروو موتور چیست ؟
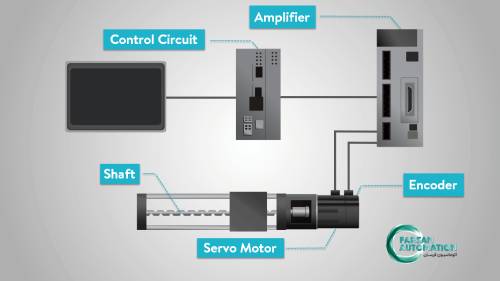
بیایید با اصول اولیه سروو موتور شروع کنیم. سروو موتورها بخشی از یک سیستم حلقه بسته هستند و از چندین بخش شامل مدار کنترل، موتور سروو، شفت، پتانسیومتر، چرخ دنده های محرک، تقویت کننده و یک انکدر یا ریزولور (resolver) تشکیل شده اند.
سروو موتور یک دستگاه الکتریکی مستقل است که قسمتهای دستگاه را با راندمان بالا و با دقت زیاد میچرخاند.
شفت خروجی این موتور را می توان به زاویه، موقعیت و سرعت خاصی که موتور معمولی ندارد حرکت داد.
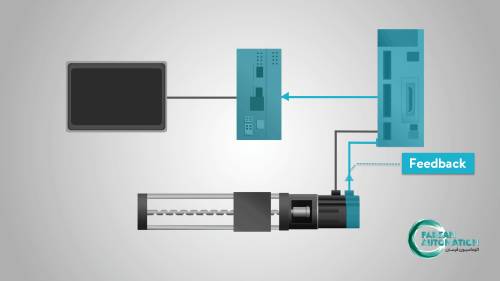
سروو موتور از یک موتور معمولی استفاده می کند و آن را با یک سنسور برای فیدبک موقعیتی کوپل می کند.
کنترلر مهمترین قسمت سروو موتور است که به طور خاص برای این منظور طراحی و استفاده می شود.
سروو موتور (SERVO MOTOR) یک مکانیسم حلقه بسته است که دارای فیدبک موقعیتی به منظور کنترل سرعت و موقعیت چرخشی یا خطی است.
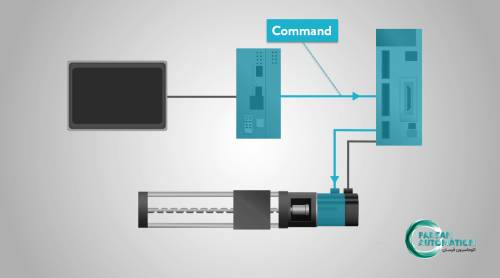
موتور با سیگنال الکتریکی ، آنالوگ یا دیجیتال کنترل می شود که میزان حرکت را تعیین می کند و نشان دهنده فرمان نهایی موقعیت برای شفت است.
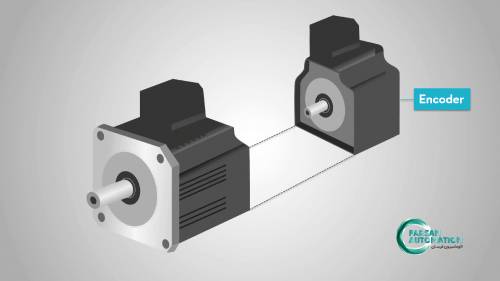
نوعی از اندکودر به عنوان سنسور ارائه دهنده فیدبک سرعت و موقعیت عمل می کند. این مدار درست در داخل محفظه موتور ساخته شده است که معمولاً به سیستم گیربکس فیکس شده است.
انواع سرو موتور
انواع سرو موتورها بر اساس کاربردشان به انواع مختلفی دسته بندی می شوند، مانند سروو موتور AC و سروو موتور DC.
سه آیتم برای ارزیابی موتورهای سروو وجود دارد. اول بر اساس جریان آنها – AC یا DC، و ثانیاً بر اساس نوع کموتاسیون مورد استفاده، اینکه آیا موتور از جاروبک استفاده می کند یا خیر ومورد سوم ، میدان چرخشی موتور ، روتور چه چرخش همزمان (سنکرون ) باشد یا غیرهمزمان( آسنکرون ).
بیایید اولین دسته بندی سروو را مورد بررسی قرار دهیم. AC یا DC بودن ، اساسی ترین مبنای طبقه بندی موتورمیباشد که براساس نوع جریانی است که استفاده می کند. اگر از نقطه نظر عملکرد به آن نگاه کنیم، تفاوت اصلی بین موتورهای AC و DC در توانایی ذاتی برای کنترل سرعت است.

با یک موتور DC، سرعت به ولتاژ تغذیه با بار ثابت نسبت مستقیم دارد. و در موتور AC سرعت با فرکانس ولتاژ اعمال شده و تعداد قطب های مغناطیسی تعیین می شود.
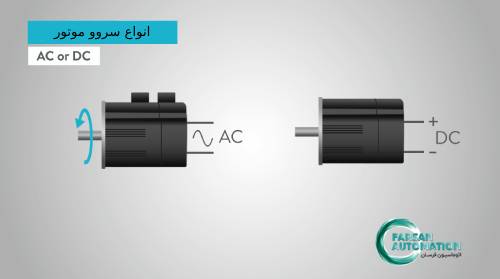
در صورتیکه موتورهای AC و DC هر دو در سیستم های سروو استفاده شوند، موتورهای AC جریان بالاتری را تحمل می کنند و معمولاً در کاربردهای سروو مانند ربات ها، تولید درون خطی و سایر کاربردهای صنعتی که در آنها تکرار زیاد و دقت بالا مورد نیاز است، استفاده می شود.
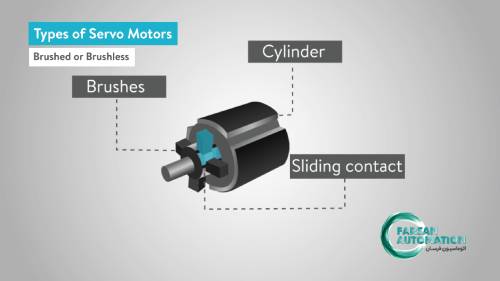
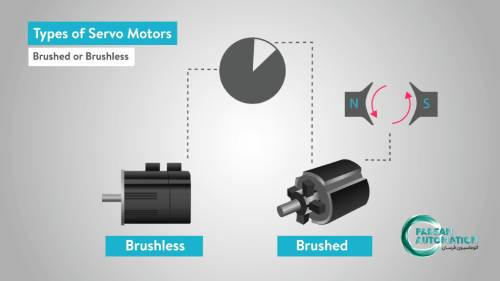
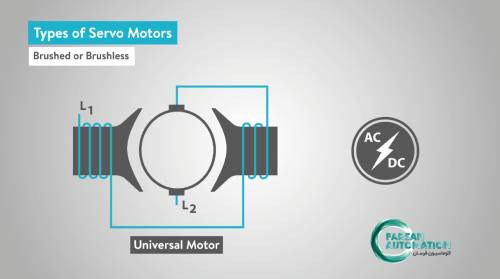
دارابودن جاروبک (Brushed ) یا بدون جاروبک (Brushless) مرحله بعدی است.یک سروو موتور DC به صورت مکانیکی با جاروبک، با استفاده از یک کموتاتور یا به صورت الکترونیکی بدون جاروبک جابجا می شود.
موتورهای جاروبک دار معمولاً ارزان تر بوده و کار با آنها ساده تر است، در حالی که طراحی های بدون جاروبک قابل اعتمادتر هستند، راندمان بالاتری دارند و نویز کمتری دارند.

کموتاتور یک کلید الکتریکی دوار است که به صورت دوره ای و متناوب جهت جریان بین روتور و مدار درایو را معکوس می کند.
کموتاتور شامل سیلندری است که از چندین بخش کنتاکت فلزی روی روتور تشکیل شده است. دو یا چند کنتاکت الکتریکی به نام “جاروبک”، برخلاف کموتاتور از یک ماده رسانای نرم مانند پرس کربن ساخته شده است که در حین چرخش با بخش هایی از کموتاتور تماسی فیزیکی ایجاد می کند.
در حالی که اکثر موتورهای مورد استفاده در سیستم های سروو، به صورت طراحی بدون جاروبک AC هستند، موتورهای آهنربای دائمی جاروبک دار به دلیل سادگی و هزینه کم، گاهی اوقات به عنوان موتورهای سروو استفاده می شوند.
رایج ترین نوع موتور DC جاروبک دار که در کاربردهای سروو استفاده می شود، موتور DC آهنربای دائم است.
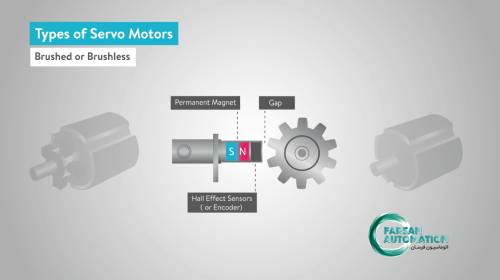
موتورهای DC بدون جاروبک، جاروبک های فیزیکی و کموتاتور را با وسیلهای الکترونیکی باهدف کاهش جرم، معمولاً از طریق استفاده از سنسورهای اثر هال یا انکدر جایگزین میکنند.
موتورهای AC عموماً بدون جاروبک هستند، اگرچه برخی از طرحها مانند موتور یونیورسال که میتواند با برق AC یا DC کار کند، وجود دارد که دارای جاروبک هستند و به صورت مکانیکی جا به جا میشوند.
و طبقه بندی نهایی که باید در نظر گرفت این است که آیا عملکرد سروو موتور از یک میدان چرخشی سنکرون یا آسنکرون استفاده می کند.
در حالی که موتورهای DC به طور کلی به عنوان جاروبک دار یا بدون جاروبک طبقه بندی می شوند، موتورهای AC اغلب با سرعت میدان سنکرون یا آسنکرون دوارشان متمایز می شوند.
اگر از ملاحظات AC-DC به یاد بیاوریم ، در یک موتور AC، سرعت با فرکانس ولتاژ تغذیه و تعداد قطب های مغناطیسی تعیین می شود.
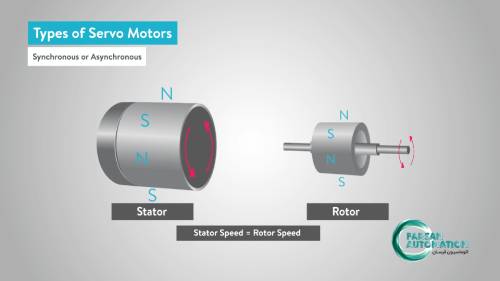
به این سرعت، سرعت سنکرون می گویند. بنابراین، در یک موتور سنکرون، روتور با همان سرعت میدان مغناطیسی دوار استاتور میچرخد.
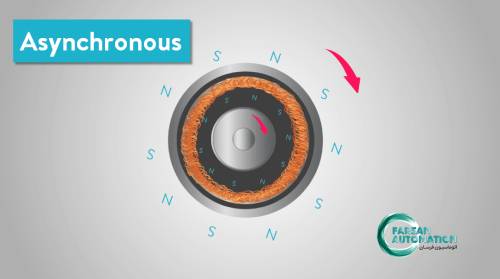
درحالی که، در یک موتور آسنکرون، که معمولا به عنوان موتور القایی شناخته میشود، روتور با سرعتی کمتر از میدان مغناطیسی دوار استاتور میچرخد.
با این حال، سرعت یک موتور ناهمزمان را می توان با استفاده از چندین روش کنترل مانند تغییر تعداد قطب ها و تغییر فرکانس تغییر داد.
اصول کار سروو موتور DC شامل چهار جزء اصلی ، یک موتور DC، یک دستگاه سنجش موقعیت، یک مجموعه گیربکس و مدار کنترل است.
سرعت مورد نظر موتور DC بر اساس ولتاژ اعمال شده است.
برای کنترل سرعت موتور، یک پتانسیومتر ولتاژی تولید می کند که به عنوان یکی از ورودی های تقویت کننده خطا اعمال می شود.
در برخی مدارها از یک پالس کنترلی برای تولید ولتاژ مرجع DC مطابق با موقعیت یا سرعت مورد نظر موتور استفاده می شود و به مبدل ولتاژ عرض پالس اعمال می شود.
طول پالس ، ولتاژ اعمال شده در تقویت کننده خطا را به عنوان ولتاژ مورد نظر تعیین می کند تا سرعت یا موقعیت مورد نظر را ایجاد کند.
برای کنترل دیجیتال، از یک PLC زیمنس یا سایر موشن کنترلرها برای تولید پالسها استفاده میشود تا کنترل دقیقتری ایجاد شود.
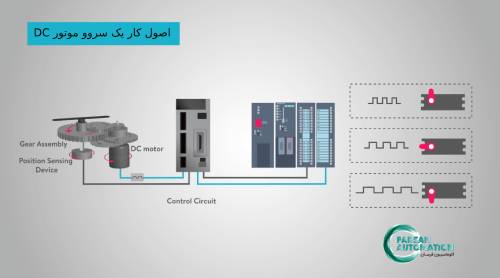
سنسور فیدبک معمولاً یک پتانسیومتر است که ولتاژ متناسب با زاویه مطلق شفت موتور را از طریق مکانیزم گیربکس تولید می کند. سپس مقدار ولتاژ فیدبک در ورودی تقویت کننده مقایسه کننده خطا اعمال می شود.
تقویت کننده ولتاژ تولید شده از موقعیت فعلی موتور را که از فیدبک پتانسیومتر حاصل می شود و با موقعیت مطلوب و موردنظر موتور مقایسه می کند که خطای ولتاژ مثبت یا منفی ایجاد می کند.
این ولتاژ خطا به آرمیچر موتور اعمال می شود. با افزایش خطا، ولتاژ خروجی اعمال شده به آرمیچر موتور نیز افزایش می یابد. تا زمانی که خطا وجود دارد، تقویت کننده مقایسه کننده ولتاژ خطا را تقویت می کند و به همان نسبت آرمیچر را تغذیه می کند.
موتور می چرخد تا خطا به صفر برسد. اگر خطا منفی باشد، ولتاژ آرمیچر معکوس می شود و از این رو آرمیچر در جهت مخالف می چرخد.

اصول کار سروو موتورهای AC بر اساس ساخت و ساز با دو نوع مجزا از سروو موتورهای AC، سنکرون و ناهمزمان (القایی) است.
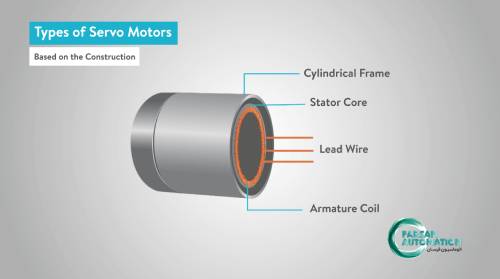
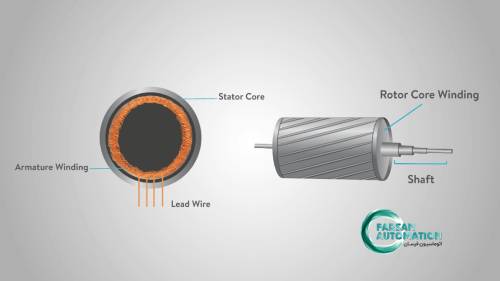
سروو موتور AC سنکرون از استاتور و روتور تشکیل شده است. استاتور از یک قاب استوانه ای و هسته استاتور تشکیل شده است.
سیم پیچ آرمیچر در اطراف هسته استاتور پیچیده شده و سیم پیچ به سیم سربی متصل می شود که از طریق آن جریان به موتور می رسد.
روتور از یک آهنربای دائمی تشکیل شده است و این با روتور نوع القایی آسنکرون که درآن جریان در روتور توسط الکترومغناطیس القا می شود ، تفاوت دارد و بنابراین به این نوع موتورهای سروو بدون جاروبک می گویند.
هنگامی که میدان استاتور با ولتاژ برانگیخته می شود، روتور میدان مغناطیسی دوار استاتور را با همان سرعت دنبال می کند یا با میدان برانگیخته استاتور هماهنگ می شود و اینجاست که نوع سنکرون به دست می آید.
با استفاده از این روتور آهنربای دائمی، جریان روتور مورد نیاز نیست، بنابراین هنگامی که میدان استاتور خاموش می شود و متوقف می شود، روتور نیز متوقف می شود. این موتورها به دلیل عدم وجود جریان روتور دارای راندمان بالاتری هستند.
هنگامی که موقعیت روتور نسبت به استاتور مورد نیاز است، یک انکدر روی روتور قرار می گیرد و فیدبکی را به کنترل کننده سروو موتور ارائه می دهد.
استاتور سروموتور AC آسنکرون یا القایی از هسته استاتور، سیم پیچ آرمیچر و سیم سرب و روتور از شفت و سیم پیچ هسته روتور تشکیل شده است.
اکثر موتورهای القایی حاوی یک عنصر چرخشی، روتور یا قفس سنجابی هستند.
فقط سیم پیچ استاتور با منبع AC تغذیه می شود.
میدان شار متناوب در اطراف سیم پیچ استاتور با منبع AC تولید می شود. این میدان شار متناوب با سرعت سنکرون می چرخد.
شار گردان میدان مغناطیسی دوار (RMF) نامیده می شود. سرعت نسبی بین میدان مغناطیسی دوار استاتور و هادی های روتور بر اساس قانون القای الکترومغناطیسی فارادی باعث ایجاد نیروی الکترومغناطیسی القایی در هادی های روتور می شود. این همان عملی است که در ترانسفورماتورها اتفاق می افتد.
حال، جریان القایی در روتور نیز یک میدان شار متناوب در اطراف خود ایجاد می کند. این شار روتور از شار استاتور عقب است.
سرعت روتوربه میدان شار استاتور دوار مرتبط است و روتور در همان جهت شار استاتور می چرخد.
روتور در رسیدن به سرعت شار استاتور موفق نیست یا سنکرون نیست، از این رو نوع آسنکرون به دست می آید.
کاربردهای سروو موتور
کاربردهای سروو موتور در بسیاری از سیستم ها و محصولات صنعتی و تجاری استفاده می شود، مانند رباتیک که در آن از یک سروو موتور در هر “مفصل” یک ربات برای انجام زاویه حرکت دقیق آن استفاده می شود.
فوکوس خودکار دوربین از یک موتور سروو تعبیه شده در دوربین استفاده می کند که موقعیت لنز را دقیقاً تصحیح می کند تا تصاویر خارج از فوکوس را واضح کند.
و با سیستم های تعیین موقعیت آنتن که در آن از موتورهای سروو برای موقعیت یابی محورهای آزیموت و ارتفاع آنتن ها و تلسکوپ ها مانند آنچه توسط رصدخانه ملی رادیویی نجوم استفاده می شود، استفاده می شود.
در این پست وبلاگ، آموختید سروو موتور چیست و چگونه کار می کند، به پایان می رسد. امیدوارم آنچه را که برای پیشرفت در ایجاد پروژه کنترل حرکت خود لازم است، آموخته باشید.
ما در اتوماسیون فرسان نمایندگی زیمنس امیدواریم که این مقاله برای شما جالب بوده باشد و برای دیدن وبلاگ های آموزشی بیشتر باز هم از سایت ما دیدن فرمائید. برای مشاهده قیمت سروو زیمنس به لینک های زیر مراجعه بفرمائید.